6-Axis Robot Arm
Systems Integration & Power Electronics
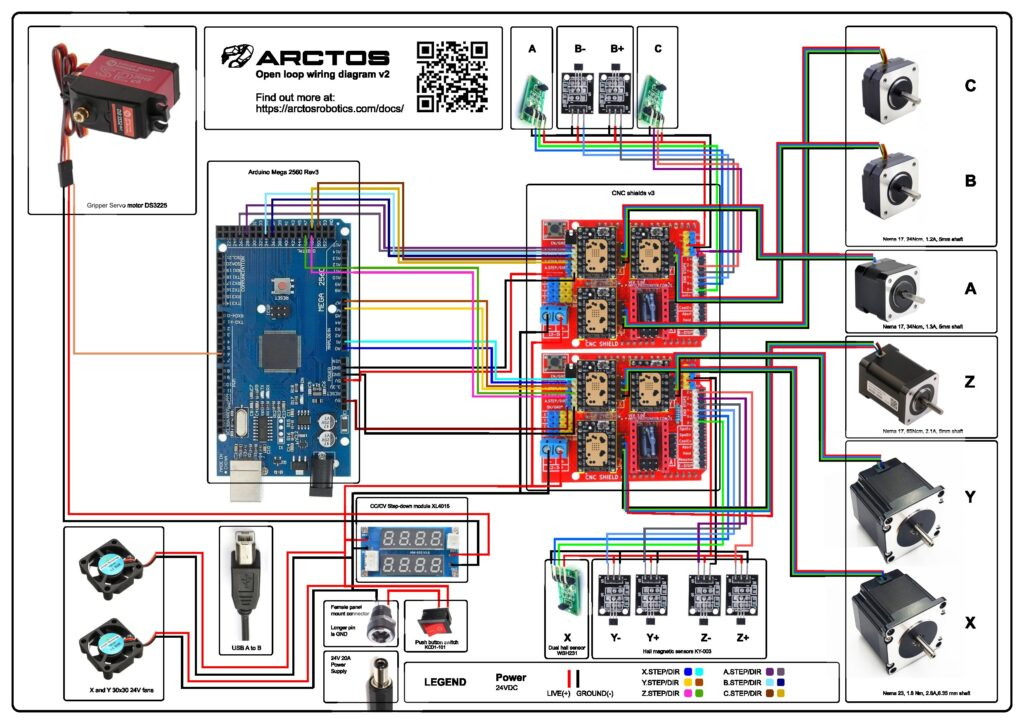
System Schematics
01. Raw Schematics (As Instructed)
02. Cooked Schematics (Custom Improvements)
Key Hardware Components
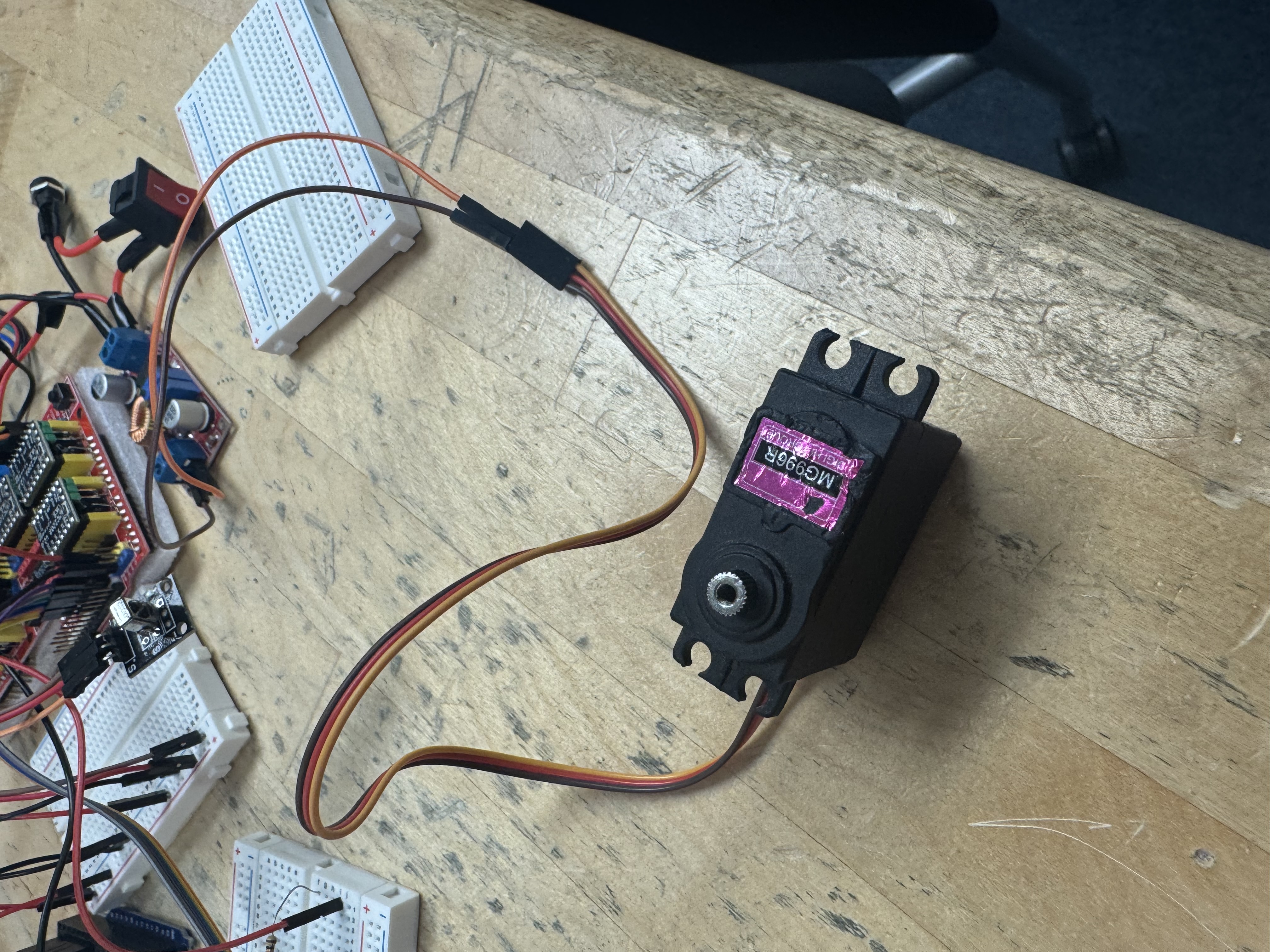
25kg Servo
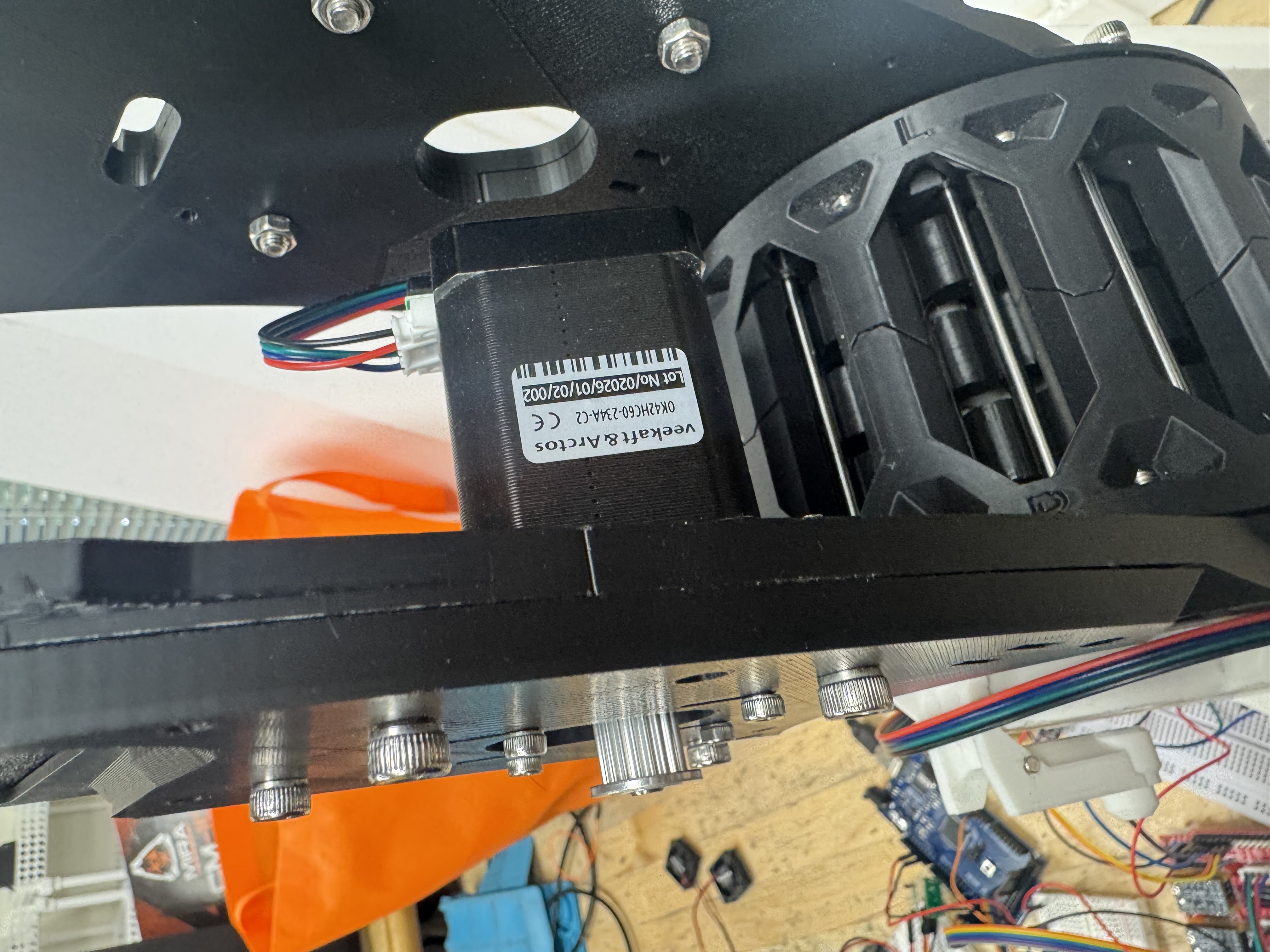
NEMA Stepper
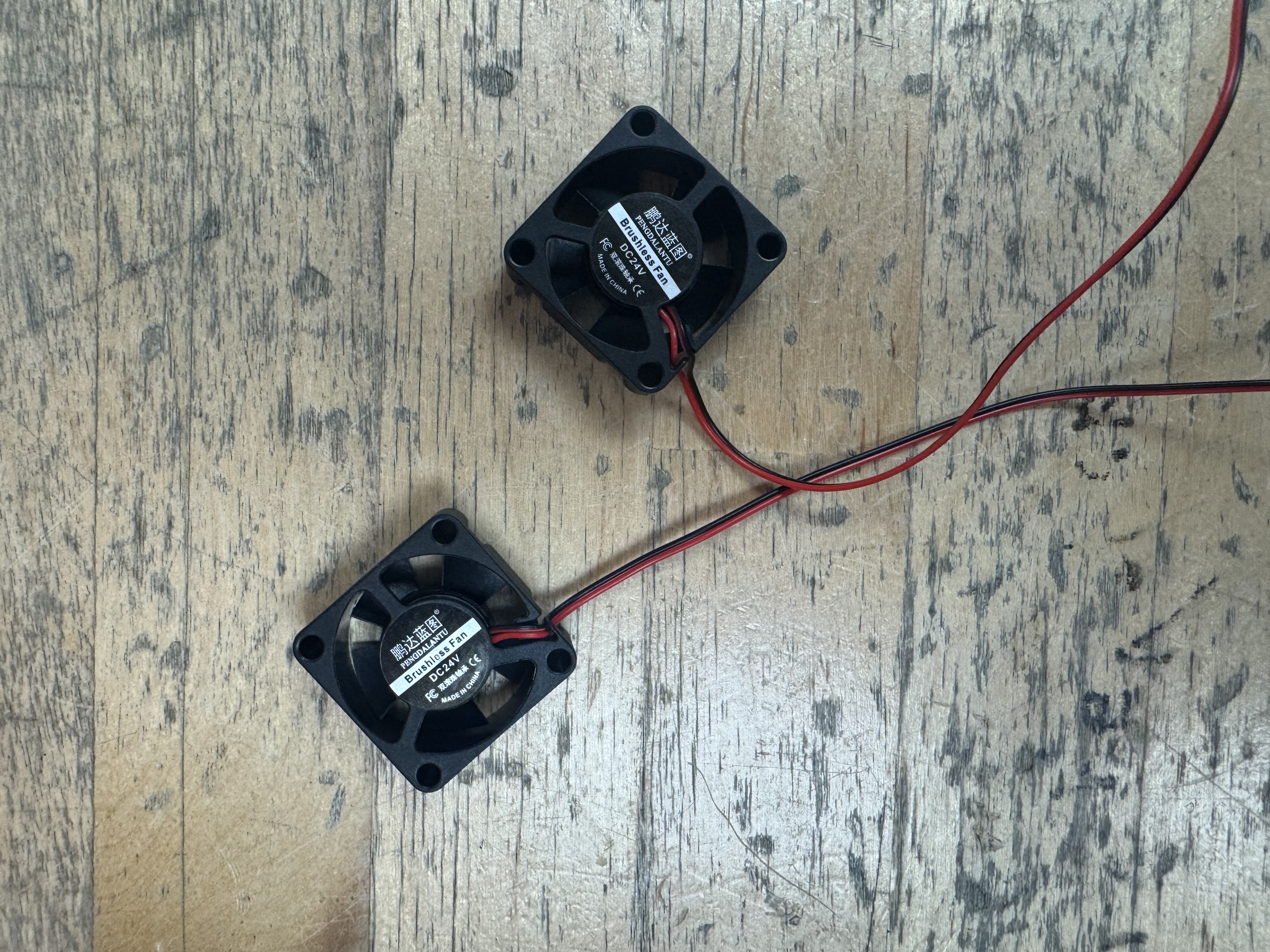
Cooling System
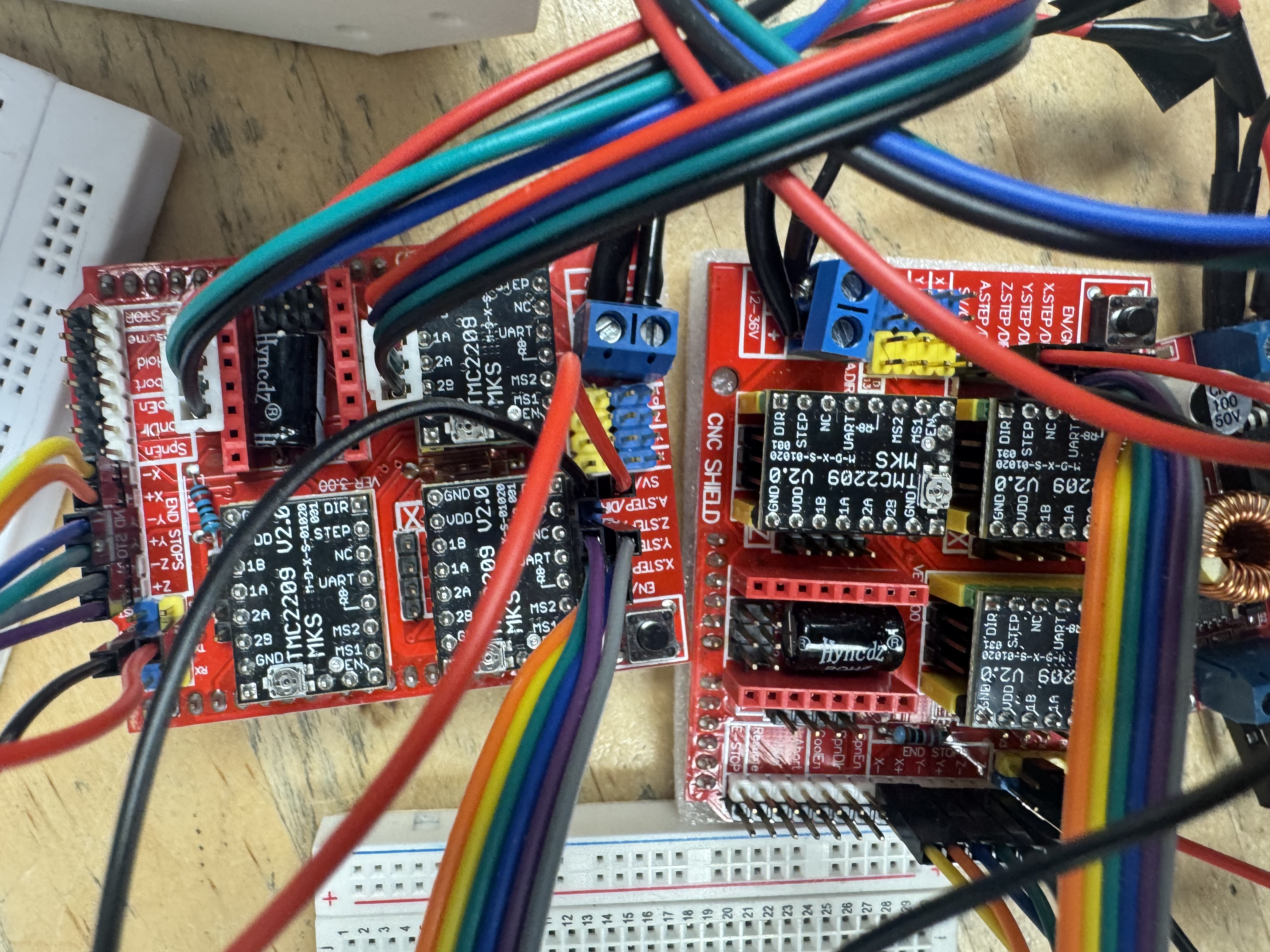
CNC Driver
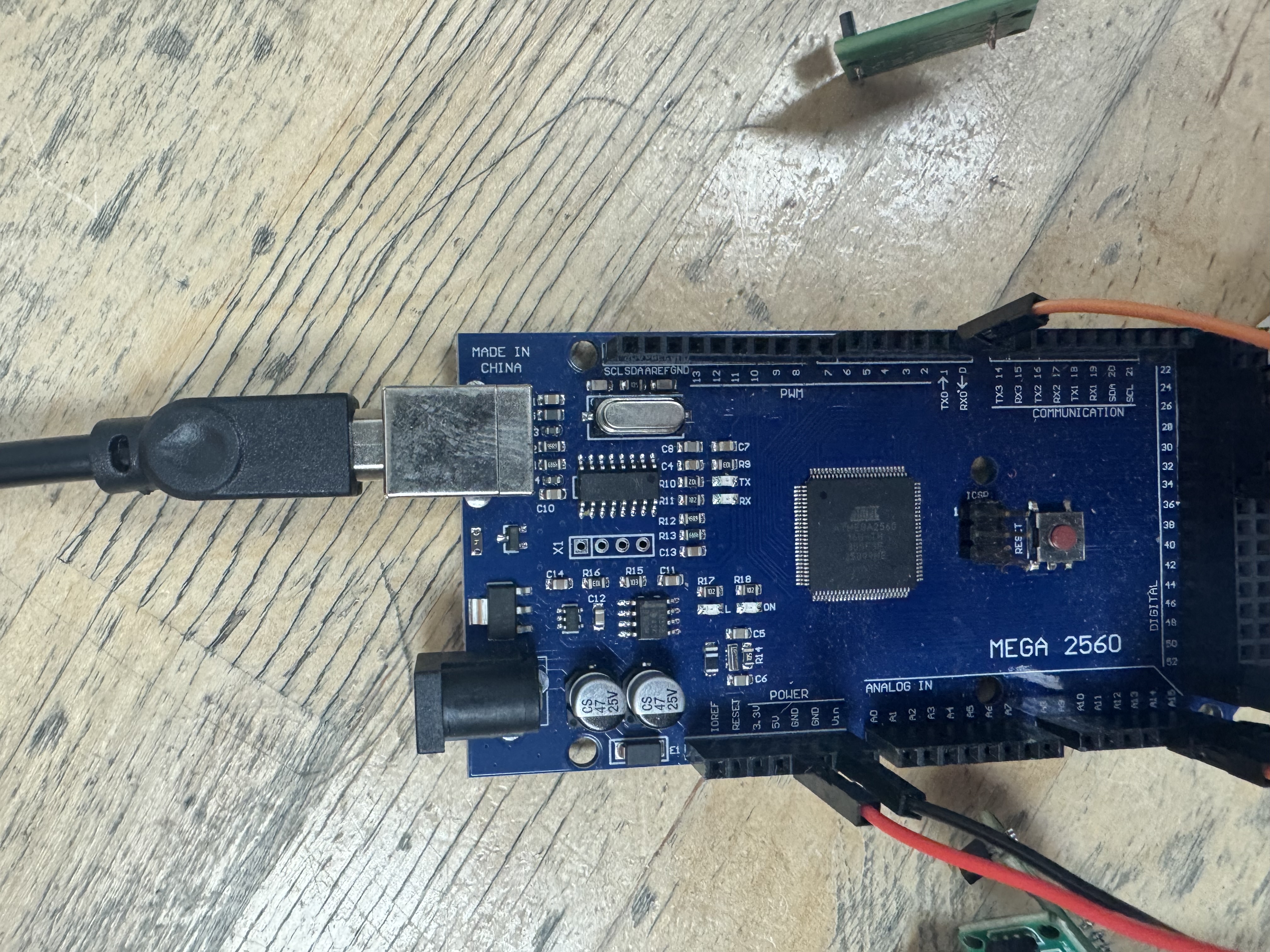
Microcontroller
Step Down (24V -> 8V)
Motion Control
Technical Challenge & Debugging Roadmap
Servo Current Inrush
The 25kg servo motor draws significant current during peak torque, causing logic rail instability.
Proposed Idea: Use a 1000uF / 16V capacitor for decoupling to buffer the power rail.
Buck Converter Polar Sensitivity
The XL4016 input is polarized; accidental reverse polarity will cause catastrophic component failure.
Proposed Idea: Integrate a protection diode at the input stage to prevent blow-ups.
Over-Current Safety (15A+)
System current may exceed 15A during multi-axis movement, risking heat damage or fire.
Proposed Idea: Add an inline fuse to the primary power rail to protect the entire system.
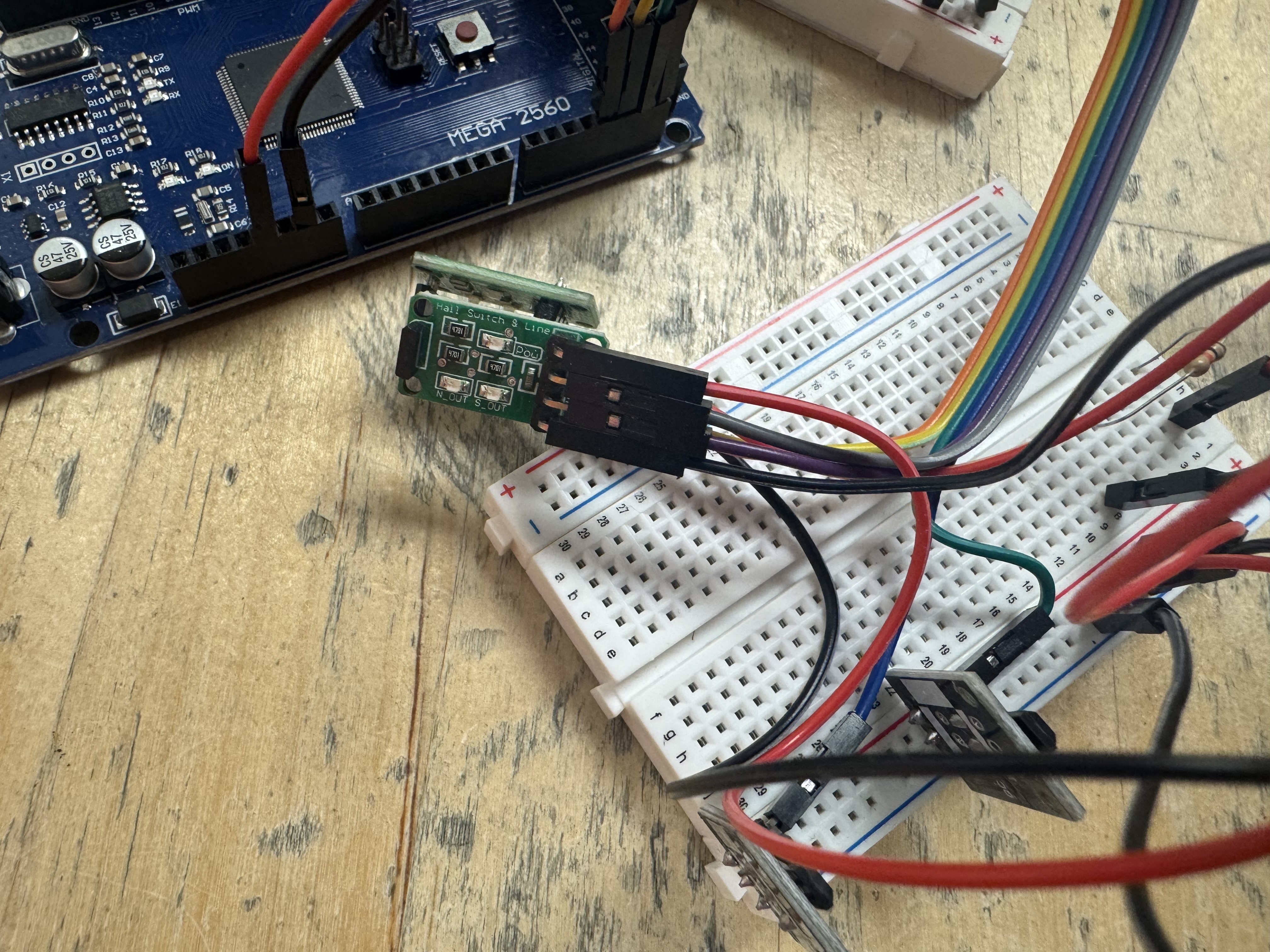
Breadboard Connection Instability
The current prototype relies on jumper wires and breadboards, which are prone to loosening during transport or storage. With over 30 critical connections, a single loose wire creates significant downtime during re-diagnosis.
Proposed Idea: Design a custom PCB with pin headers to replace loose wiring with trustable, secure connections.
Technical Source Code
Review the firmware and system logic on GitHub.